| Home | Projects | About Me |
Beyond robotics, I'm also interested in AI agents, computer vision, and ML theory. I regularly maintain and build new projects here.
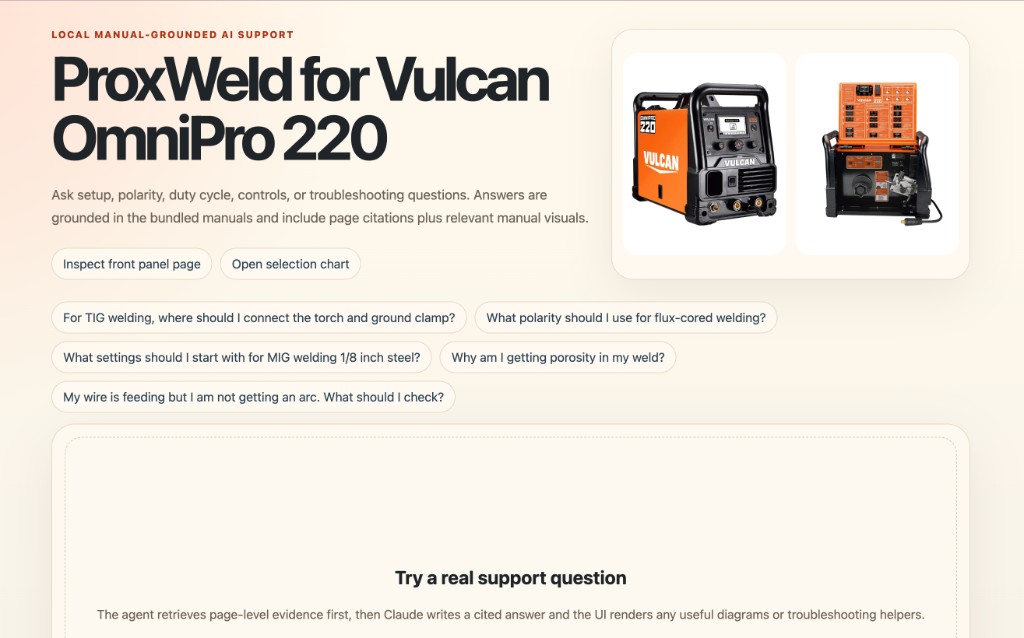 |
[Code] Built a manual-grounded AI support agent for the Vulcan OmniPro 220 welder using retrieval over bundled PDF manuals and the Claude Agent SDK, returning page-level citations, manual visuals, and structured wiring/troubleshooting helpers through a Next.js chat UI. |
|
Input
Output

|
[Code] A reproducible workflow for removing dynamic objects from videos by integrating YOLO for detection, OSTrack for tracking, SAM2 for segmentation, and DiffuEraser for diffusion-based inpainting. The system ensures temporal consistency and high-quality background restoration. |
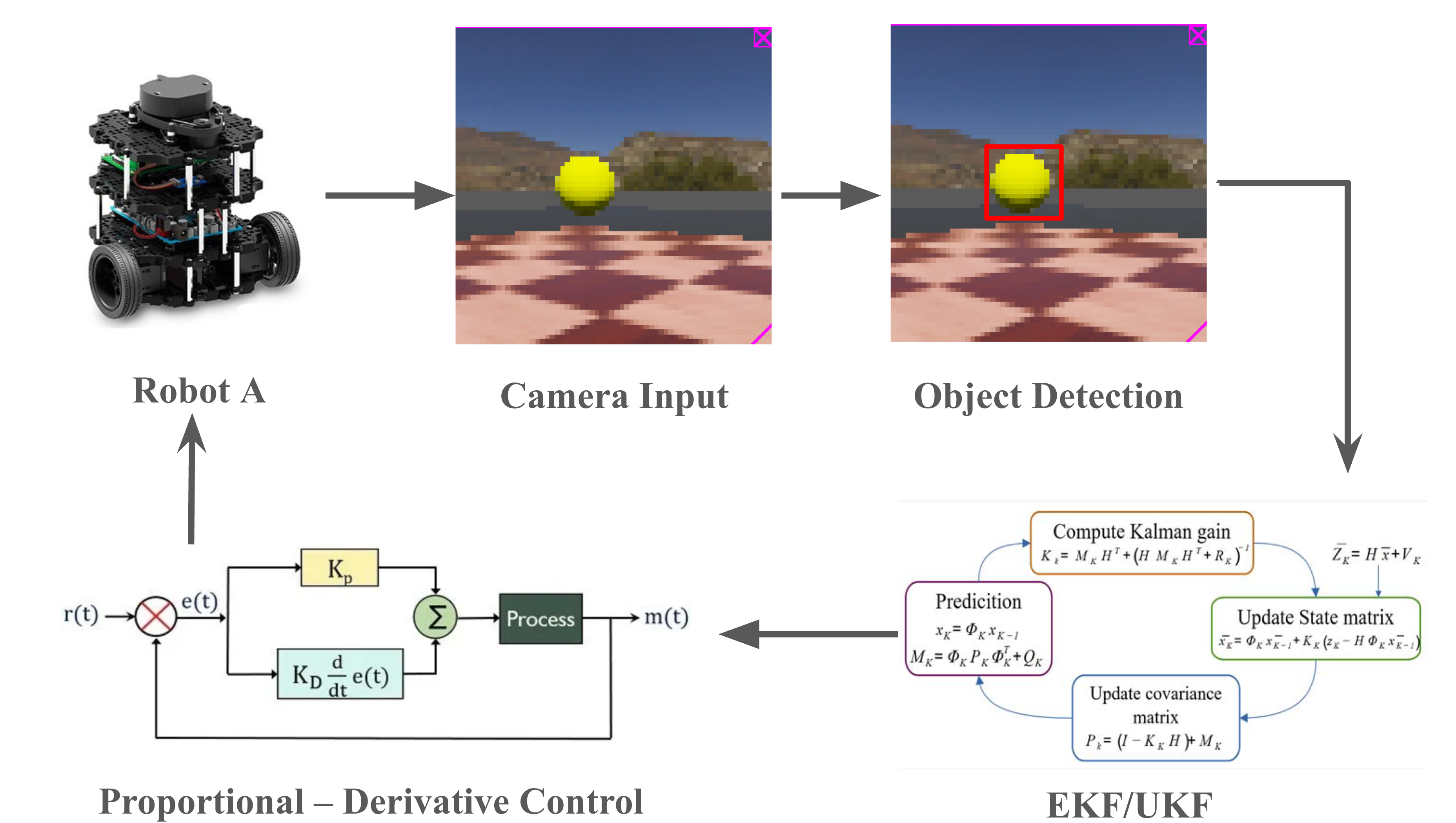 |
[Report] / [Code] Developed a dual-robot system for autonomous emergency response, where an "explorer" robot uses vision-based detection and an EKF/UKF to locate targets and a "rescuer" robot uses the A* algorithm to navigate to them. The framework is validated in the Webots simulator. |
|
|
[Code] A growing collection of SolidWorks models and assemblies (grippers, robot arms, and more) aimed at enabling affordable, open-source robotic platforms. Future additions planned: small vehicles, mobile manipulators, multi-legged robots, and more. |
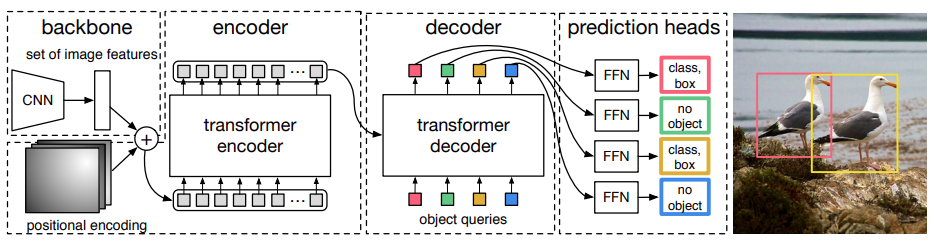 |
[Report] / [Code] Fine-tuned DETR (End-to-End Object Detection with Transformers) for traffic object detection task using KITTI object detection dataset, achieving 71.1% mAP with 18.1ms latency. |
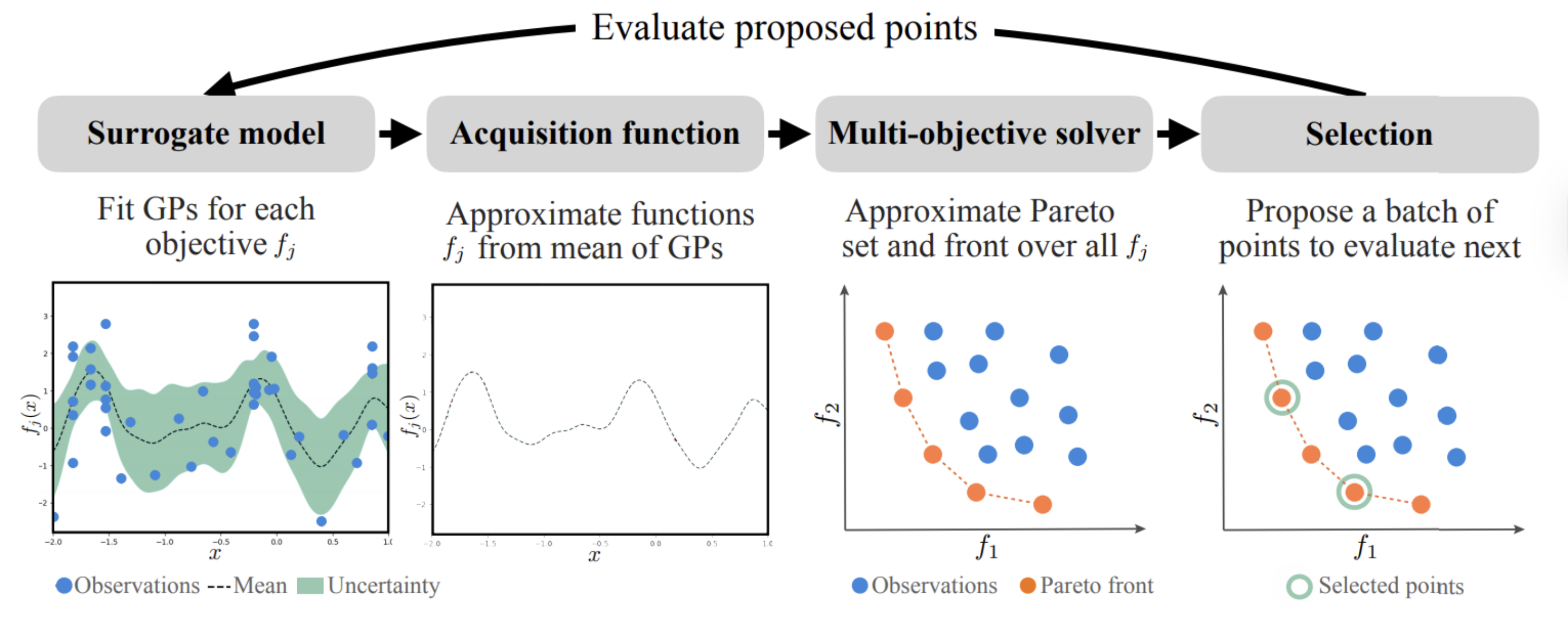 |
[Report] We developed a Scalarized Upper Confidence Bound function for Bayesian Optimization in hyperparameter tuning. It was tested by benchmarking on SVM and CNN models, reducing latency by 8% at equivalent accuracy compared to standard methods. |