|
Hi, I'm Huaze, also go by Patrick. I'm a visiting student at Georgia Institute of Technology working on humanoid whole-body control and tactile sensing, advised by Prof. Ye Zhao. Previously, I graduated from Harvey Mudd College with high distinction, where I worked with Prof. Adyasha Mohanty on sensor fusion for trustworthy autonomous navigation. I also worked on humanoid robot control and dexterous manipulation under the supervision of Prof. Michael Tolley and Prof. Hao Su at UC San Diego. I work on robotics control, dexterous manipulation, and reinforcement learning. Broadly speaking, I'm interested in how systems perceive and acts in the real world robustly. Email / Github / Linkedin / Google Scholar |
|
|
My research focuses on:
|
|
|
|
|
|
Kehlani Fay*, Arth Shukla*, Huaze Liu, Darin Djapri, Alexiy Buynitsky, Nicklas Hansen 4th RSS Workshop on Dexterous Manipulation [pre-release project page] / [pre-Arxiv] |
|
|
Huaze Liu *, Zihao Gao *, Adyasha Mohanty Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2025) [Paper] / [Slides] / [Code] |
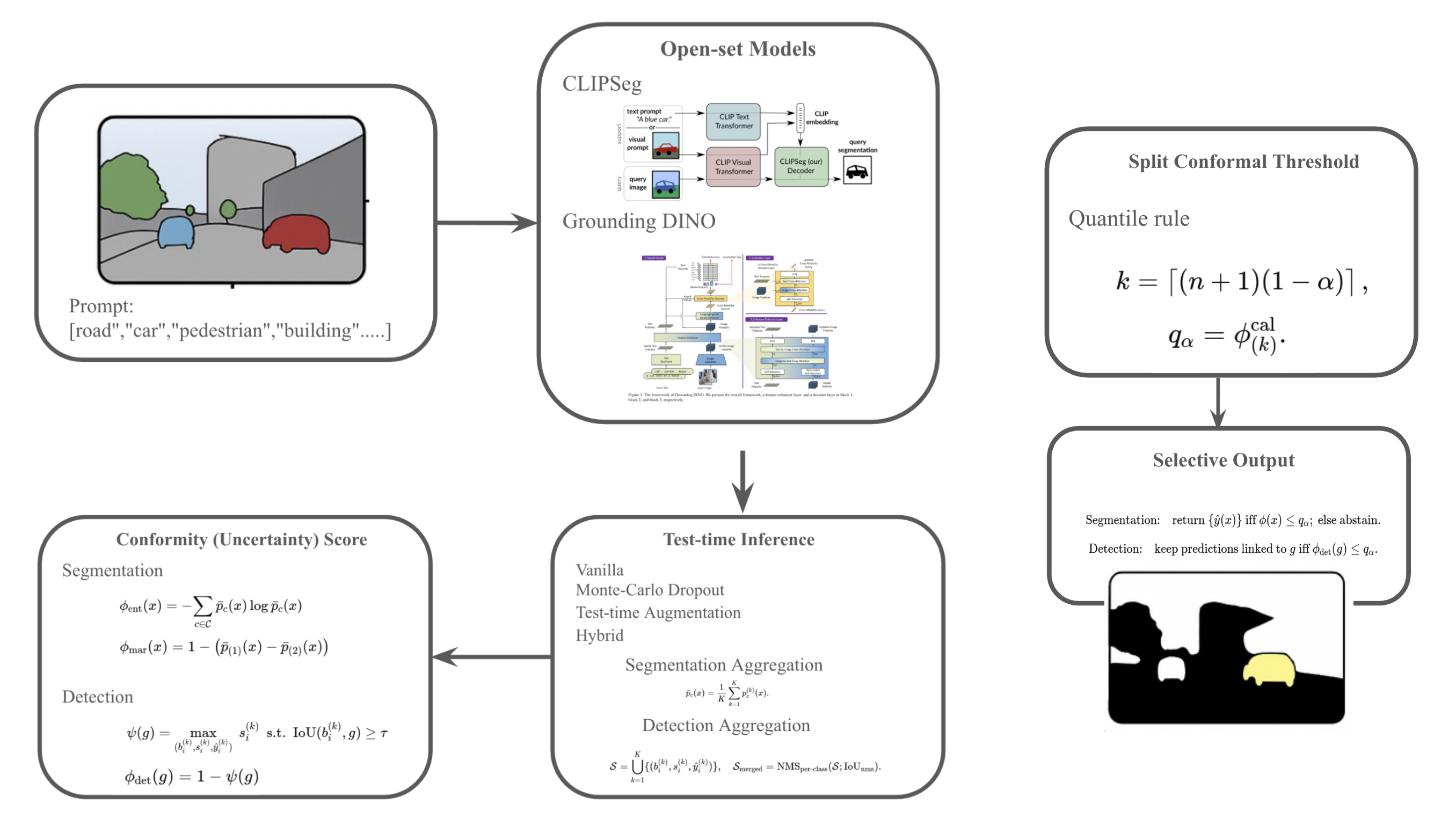 |
Huaze Liu, Adyasha Mohanty Southern California AI and Robotics Symposium 2025 [Paper] / [Paper (Long version)] |
|
|
|
|
Beyond robotics, I'm also interested in AI agents, computer vision, and ML theory. I regularly maintain and build new projects here. |
|
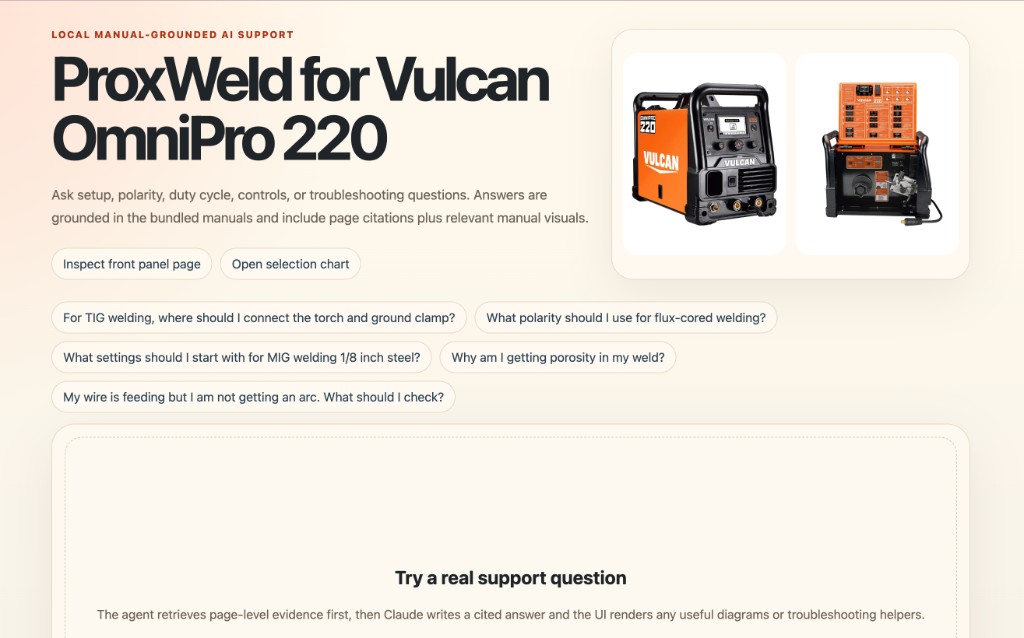 |
[Code] Built a manual-grounded AI support agent for the Vulcan OmniPro 220 welder using retrieval over bundled PDF manuals and the Claude Agent SDK, returning page-level citations, manual visuals, and structured wiring/troubleshooting helpers through a Next.js chat UI. |
|
Input
Output

|
[Code] A reproducible workflow for removing dynamic objects from videos by integrating YOLO for detection, OSTrack for tracking, SAM2 for segmentation, and DiffuEraser for diffusion-based inpainting. The system ensures temporal consistency and high-quality background restoration. |
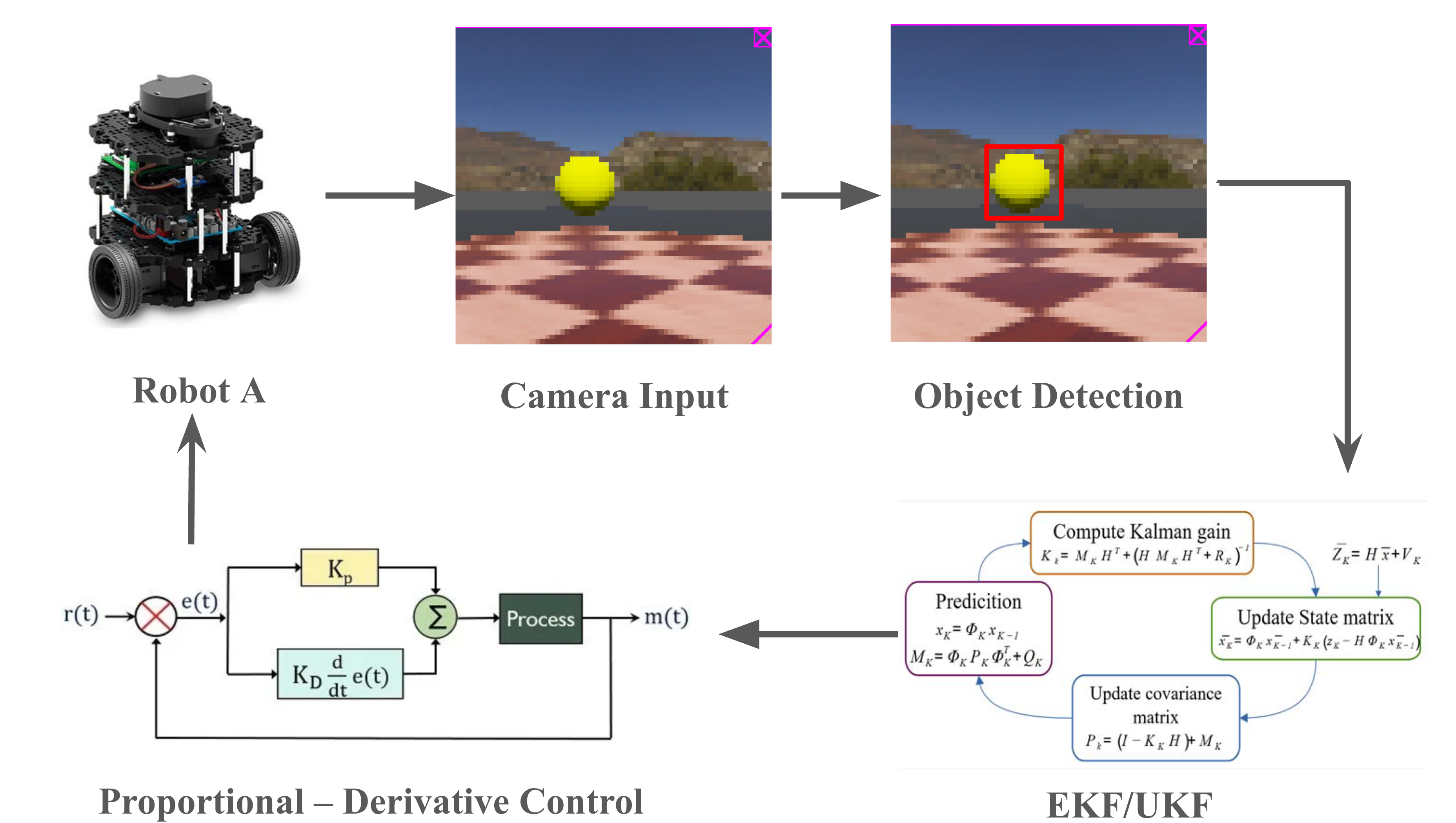 |
[Report] / [Code] Developed a dual-robot system for autonomous emergency response, where an "explorer" robot uses vision-based detection and an EKF/UKF to locate targets and a "rescuer" robot uses the A* algorithm to navigate to them. The framework is validated in the Webots simulator. |
|
|
[Code] A growing collection of SolidWorks models and assemblies (grippers, robot arms, and more) aimed at enabling affordable, open-source robotic platforms. Future additions planned: small vehicles, mobile manipulators, multi-legged robots, and more. |
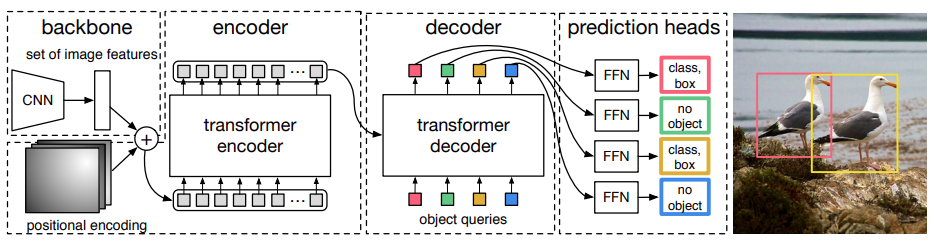 |
[Report] / [Code] Fine-tuned DETR (End-to-End Object Detection with Transformers) for traffic object detection task using KITTI object detection dataset, achieving 71.1% mAP with 18.1ms latency. |
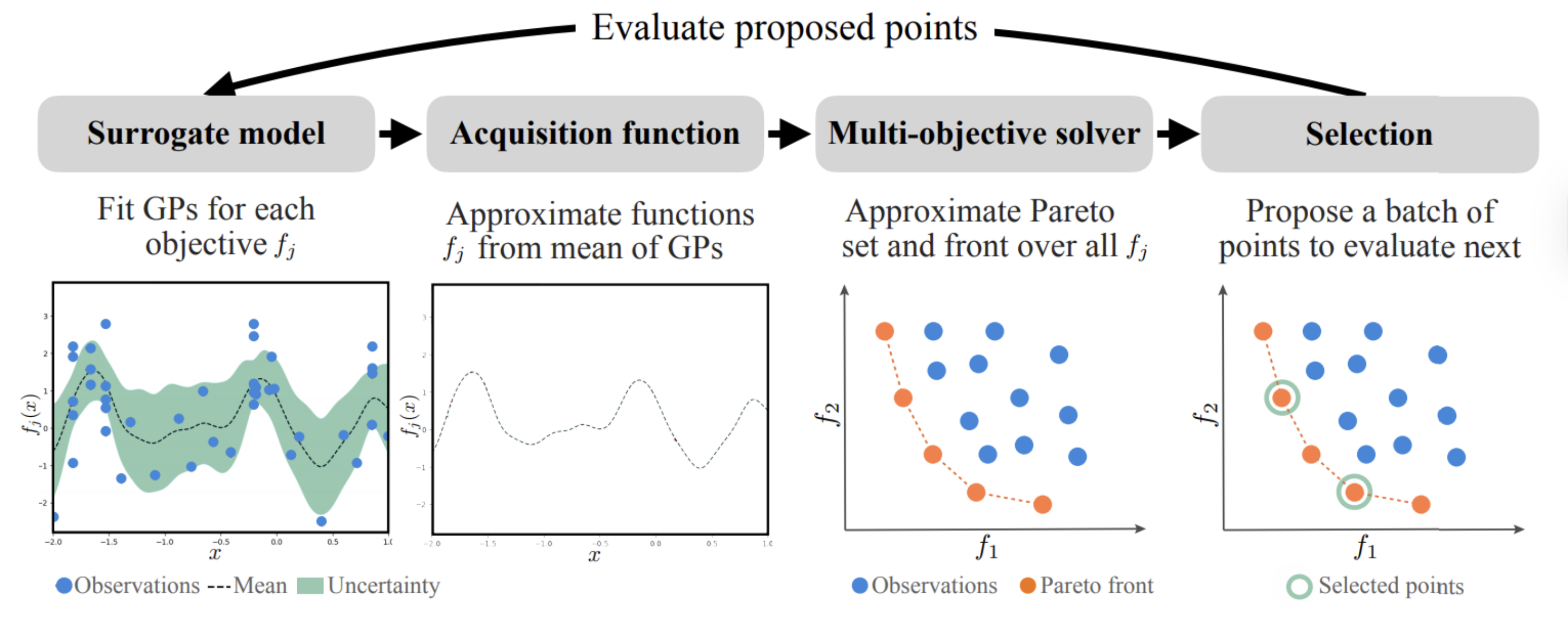 |
[Report] We developed a Scalarized Upper Confidence Bound function for Bayesian Optimization in hyperparameter tuning. It was tested by benchmarking on SVM and CNN models, reducing latency by 8% at equivalent accuracy compared to standard methods. |
|
|
|
Programming Languages: Python, C/C++, Java, MATLAB
Software / Tools: Linux, ROS/ROS2, Visual Studio, Git, Isaac Sim/Lab/Gym, Mujoco, SolidWorks, Docker, Jupyter
Technical Skills: 2D/3D Computer Vision, Sensor Fusion, Autonomous Navigation, Reinforcement Learning, Sim-to-Real Transfer
|
|
|
|
Activities: Member of Harvey Mudd RoboSub Team (2022-2023) Awards: Dean's List (2022-2025), $11,000 Shanahan Projects Fund (2024), $3,000 Leeds Student Travel Grant (2025) |